
Bonjour amis modélistes,
“Comment seront câblés les appareils de voie ?”
C‘est une préoccupation de nombre d’entre-vous et c’est souvent une source de problèmes.
Alimentation du moteur ? Polarité de la pointe de cœur ? Contacts auxiliaires ? Montage en cascade ? Oubliez tout ça : nous avons fait en sorte que le câblage soit simple et intuitif : choisissez votre moteur, muCommander vous indiquera où le brancher et avec quels fils !
La seule contrainte sera de disposer d’une connexion adaptée au type de moteur utilisé…
Il existe en effet 3 types de moteurs pour aiguillages :
- Les électro-aimants (disposant ou non d’interrupteurs de fin de course),
- Les moteurs à mouvement lent,
- Les servomoteurs.
Je vous fait grâce des effecteurs étonnant comme les fils à mémoire parce que là c’est un peu trop exotique et franchement pas d’un usage courant !
Vous devez utiliser une carte de commande muExpansion disposant des interfaces adaptées au type de moteur retenu : électroaimants, moteurs lents ou servomoteurs.
Tous ces moteurs nécessitent 3 fils de commande. Ce qui change, c’est la façon dont ces 3 fils sont utilisés.
Les électroaimants et les moteurs à mouvement lent ont une commande semblable : on utilise un fil commun pour le retour du courant, les deux autres fournissent l’autre polarité en fonction du sens du mouvement à produire. Lorsque le mouvement est terminé, on coupe le courant. On alimente donc pas le moteur en permanence, et on utilise, à un instant donné, que deux des trois fils, en fonction du sens du mouvement à obtenir.
Cependant, les électroaimants ont besoin d’une très grosse quantité d’énergie à fournir en très peu de temps, alors que les moteurs lents utilisent plutôt une quantité faible distribuée durant tout le mouvement. Pour assurer le pic de charge imposé par les électroaimants, on utilise un mécanisme dit de « décharge capacitive » spécifique à ce type de moteurs. Il leur faut donc une électronique de commande dédiée.
Les servomoteurs fonctionnent totalement différemment : deux fils servent à l’alimentation qui est permanente. Le dernier fil véhicule un signal de commande qui indique au servomoteur quel est l’angle qu’il doit adopter par rapport à son point zéro (butée dans un sens). L’électronique miniature embarquée dans le servomoteur analyse ce signal et « synchronise » la position angulaire du levier de commande. La qualité de cette électronique d’une part, et du signal de commande d’autre part, conditionne le fonctionnement fiable du servomoteur.
Quel moteur choisir ?
Concernant les moteurs à électroaimants, l’ensemble de l’offre actuelle du marché peut convenir, cependant ces moteurs consomment énormément d’énergie (et sont bruyants !). Par conséquent nous en déconseillons l’usage.
Pour les moteurs à mouvement lent, auxquels nous donnons notre préférence, vous pouvez utiliser à peu près n’importe quel modèle tant que ceux-ci ne sont pas équipés d’un décodeur DCC. En effet, ces moteurs sont, par conception, pilotés par le signal de la voie, une solution que nous avons choisi de ne pas supporter.
Nous considérons en effet que le courant DCC, très précieux, doit être réservé à la commande de la traction. Ainsi, les moteurs COBALT IP de DCC Concept, par exemple, ne sont pas compatibles avec notre système natif.
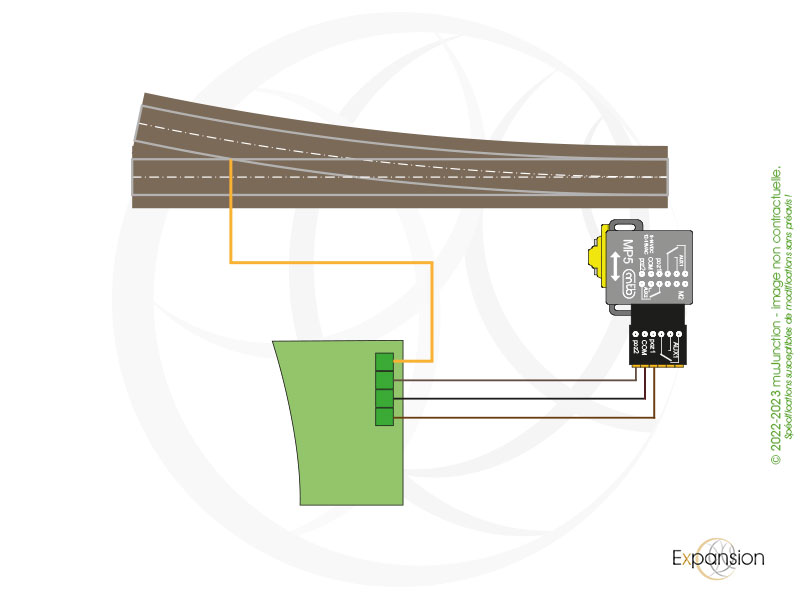
Chez muJunction, nous utilisons les moteurs de la marque MTB et plus précisément les MP1 et les MP5 : ce sont des moteurs simples, fiables et faciles à mettre en œuvre. Par rapport au MP1, l’avantage principal du MP5 est sont connecteur amovible qui facilite la mise en place sous table et les opérations d’installation / maintenance : une très bonne idée ! Un moteur qui lâche, ça arrive…
En ce qui concerne les servomoteurs, nous conseillons d’utiliser des modèles dotés de roulements à billes, bien plus fiables dans le temps que ceux équipés de bagues auto-lubrifiantes. Le servomoteur doit aussi disposer d’un couple suffisant pour maintenir une pression suffisante sur les aiguilles lors des passages de véhicules.
D‘une façon générale, nous conseillons de ne pas « mégoter sur la came » : de nombreux modèles de servomoteurs vendus à bas prix sur des sites d’enchères sont incapables de maintenir leur position de façon fiable : les aiguilles bouges sans prévenir et bonjour les déraillements ! Ce n’est surement pas ce qu’on cherche quand on monte un réseau…
A très bientôt pour un prochain DevBlog !
Gabriel